选购精密位移产品时要根据具体应用考虑不同的性能指标,正确理解各项技术指标的物理意义,对最终组建的系统的性能至关重要,因此本文就常用的一些技术指标做简要介绍。
六个自由度(Six degrees of freedom)
基于笛卡尔直角坐标系内的任意刚体有六个自由度:三个平动自由度(x,y,z)和三个转动自由度(θx,θy,θz)。对于单轴的位移机构,理想的状况是:它只沿着我们要求的运动方向移动,在其它自由度上没有移动量,但实际上无法做到,所以我们除了控制好运动方向这个自由度以外,还需要约束其它五个自由度的运动。
分辨率(Resolution)
分辨率是指移动系统可以分辨的最小位置增量。这是一个理论值,针对电动平移台而言,分辨率是指步进电机接到一个脉冲时,位移台的移动量。但由于电脉冲可以通过驱动器进行细分(参见电移台综合说明中相关部分),所以理论上单个脉冲可以做到很小,也就是说理论上位移台的移动量可以做到很小(比如说:在丝杠导程为4mm,电机步距角为1.8°,将电脉冲进行256细分时,电移台的理论分辨率为0.078um)。
但实际上当细分数过高时,想要精确控制变得很困难,而且电机对高细分后的脉冲响应也会变差,所以高细分情况下经常会发生:给了脉冲不动,或运动后不准的情况。我们标称的分辨率(开环情况下)一般是在8细分情况下的指标,这个指标相对来讲是真实的。关于这部分内容,请您参阅电机部分的基础介绍。
平移台的分辨率可以用如下公式计算:

当丝杠导程为4mm,电机的步距角为1.8°,驱动器细分数为8时,

旋转台的角度分辨率可以用如下公式计算:

当电机的步距角为1.8°,蜗轮蜗杆的传动比为180:1,驱动器细分数为8时,

精度(Accuracy):
精度往往被误解为最小移动增量(incremental motion),但最小增量实际上应该称为分辨率(Resolution),上面我们已经谈到,分辨率是一个理论值。严格意义上来说,精度是指绝对精度(Absolute Accuracy),也就是:对于一个给定的输入量,位移台运行后的实际位置。这个实际位置和理想位置,通常会有一定的差距,这就是误差。
平移台的(绝对)精度通常需要考虑到很多因素,包括控制部分、电机、联轴器、丝杠、导轨、连接用轴承等各个环节,都有可能影响平移台的(绝对)精度,对于旋转台或角位移台,也存在同样的情况。甚至在闭环系统中,光栅尺等装置本身的精度也会影响绝对精度。相关内容,请参照“电动位移台产品综合介绍”部分。
整套产品(或系统)的精度,虽然不是各个部件(或系统组件)误差的简单相加,但通常不会优于各个部件(或系统组件)的误差,这一点需要特别注意。比如,电移台的行程为200mm,假设螺杆全长为340mm,选用5级螺杆(精度23um/300mm),如果标称电移台的“精度”小于20um显然是不合适的。
重复定位精度(Repeatability):
重复定位精度是指移动系统多次可达到一个既定点的能力,通常重复定位精度是指单个方向上的,这样能将“空回”的指标分开,避免数据混乱。
空回(Backlash)
空回是指不至引起反向可测量输出的最大输出量。通俗地讲,空回就是机械结构的间隙,比如:轴向预紧不够或传动元件的啮合间隙会导致空回。首先需要明确,复杂机械结构几乎都会有空回;另外,空回是相对稳定的,并且可以通过控制进行补偿。
非轴向误差(Off-Axis
Error)
与约束的自由度方向相关的误差,包括非轴向线性误差和非轴向角度误差两个方面。
非轴向线性误差就是我们通常说的直线度,直线度分为两个正交分量,一个是垂直方向(Z方向)的直线度,称平直度(Flatness),也称为平行度、平面度;另一个是水平方向(Y方向)的直线度(Straightness),称直线度。
非轴向角度误差有三个相互垂直的分量,分别是:θz方向的偏摆(Yaw)、θy方向的俯仰(Pitch)和θx方向的转动(Roll)。
对于电动位移台系统,上述非轴向误差的说明图例如下图:
对于旋转台系统,轴向和非轴向的误差说明,请参照检验方法中的相关说明。
|
|
|
|
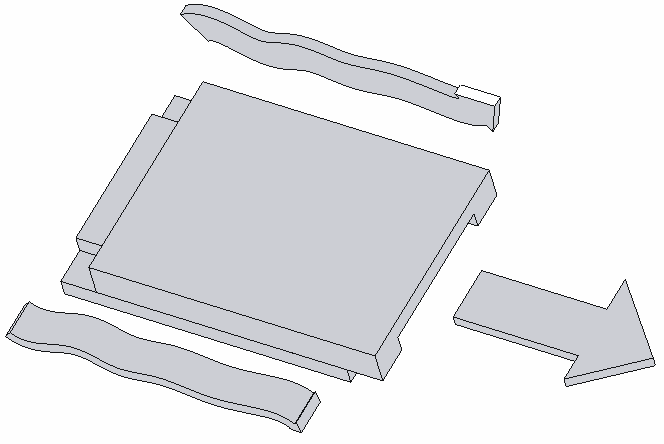 垂直方向(Z方向)的平直度(平行度、平面度) 垂直方向(Z方向)的平直度(平行度、平面度)
和水平方向(Y方向)的直线度
|

θz方向的偏摆(Yaw)、
θy方向的俯仰(Pitch)、θx方向的转动(Roll)
|




